12-Reinforcement Learning(強化學習)
1. 甚麼是 RL?
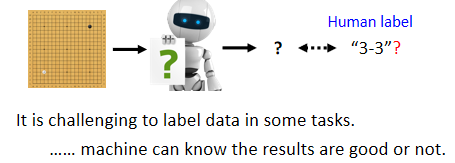
應用場景:
- 給機器一個輸入,但我們不知道最佳輸出為何
- 收集有標註的資料有難度
例如叫機器學習下圍棋,最好的下一步可能人類根本不知道。在不知道正確答案是什麽的情況下,就可以使用 RL
1.1 Actor
Reinforcement Learning 中有 Actor 及 Environment,Actor 跟 Environment 會進行互動。
actor 就是 RL 中要找的 function,輸入為 observation,輸出為 action,function 的目標是最大化從 environment 獲得的 reward 總和
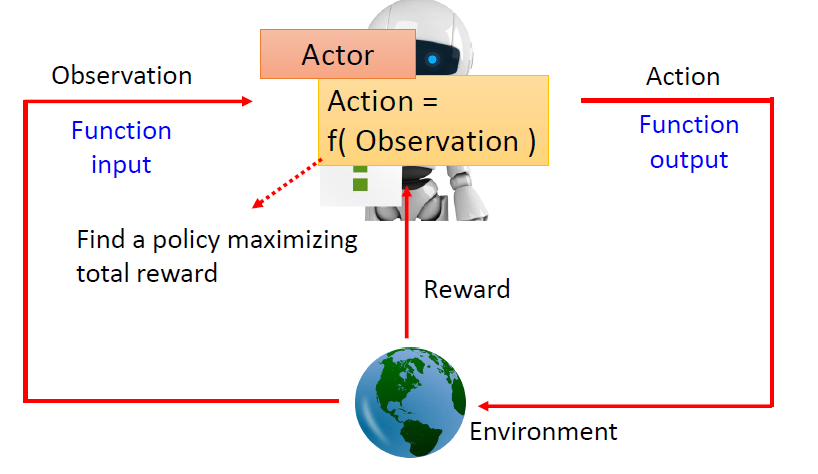
actor 以 environment 提供的 observation 作為輸入,而 actor 收到 observation 後,會輸出 action 影響 environment,environment 受到 action 的影響產生新的 observation,environment 會不斷地給 actor 一些 reward,告訴他採取的 action 好不好
Example 1:Space Invader
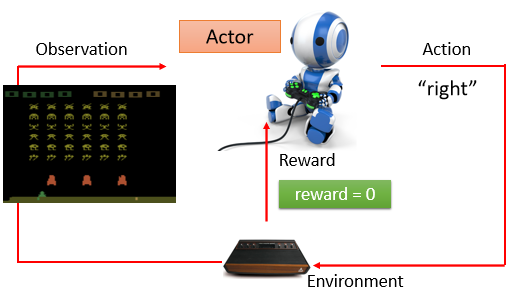
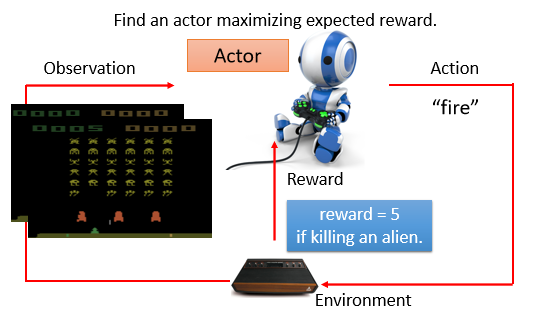
- actor:搖桿操控者
- environment:遊戲主機
- observation:遊戲畫面
- action:母艦向左、向右及開火
- reward:獲得的分數
要找一個 actor(function),可以使得到的 reward 的總和最大
Example 2:圍棋
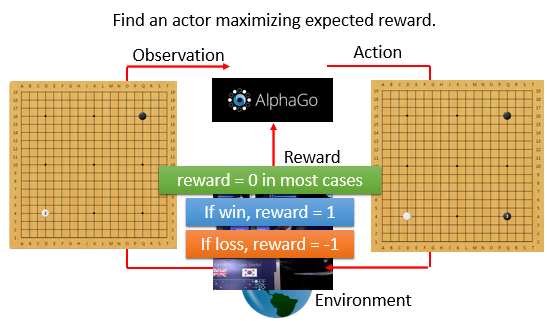
- actor :AlphaGo
- environment:人類對手
- observation:棋盤
- action:在 的棋盤上的落子
- reward:整局結束以後,贏得 1 分,輸得 0 分。過程中不會得到 reward
要找一個 actor(function),可以使得到的 reward 的總和最大
1.2 訓練三步驟
Step 1:Function with Unknown
actor 就是一個 network,稱為 Policy Network
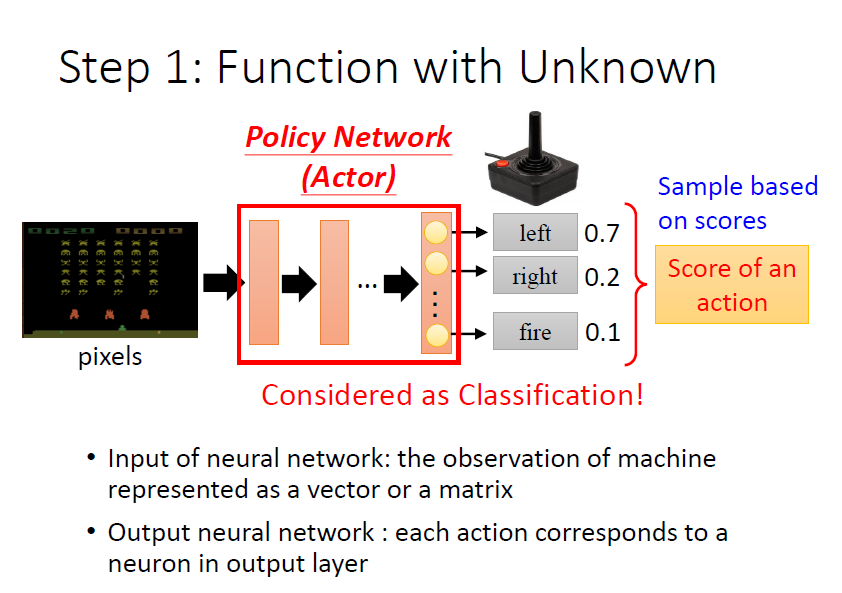
- 架構:FC、CNN、Transformer、……
- 輸入:遊戲的畫面 pixels
- 輸出:每個可採取行為的分數(向左 0.7 分、向右 0.2 分、開火 0.1 分,相加為 1)
把輸出的分數當做機率,依照這些機率 sample 出一個 action
Step 2:Define “Loss”
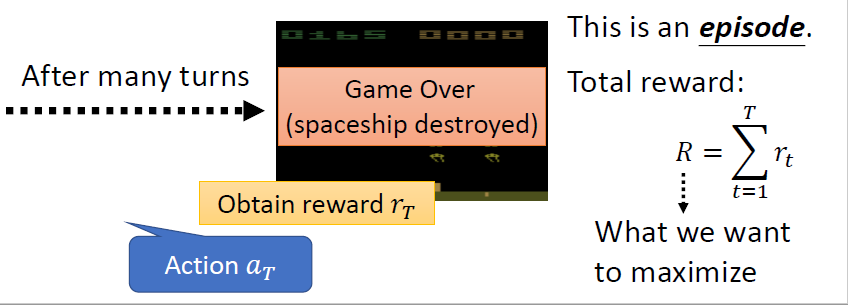
一整局遊戲稱為一個 episode,遊戲中每個行為都可能得到 reward,把所有的 reward 相加得到整場遊戲的 total reward,又稱為 return
- Reward:每個行為得到的反饋
- Return:整場遊戲得到的 reward 之和,目標是最大化 return,所以 loss 即為
Step 3:Optimization
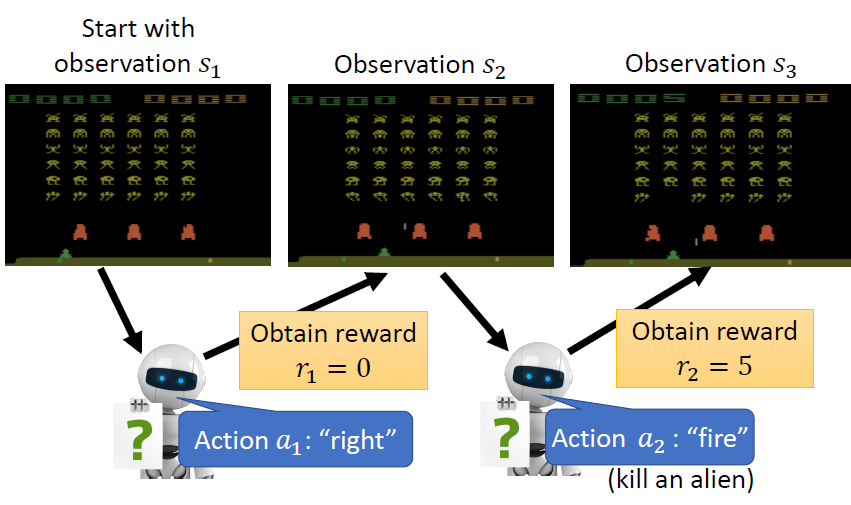
對環境的 observation ,會變成 actor 的輸入,actor 依此輸出 action , 又作為環境的輸入,根據 輸出 ,以此類推,直至滿足遊戲終止條件
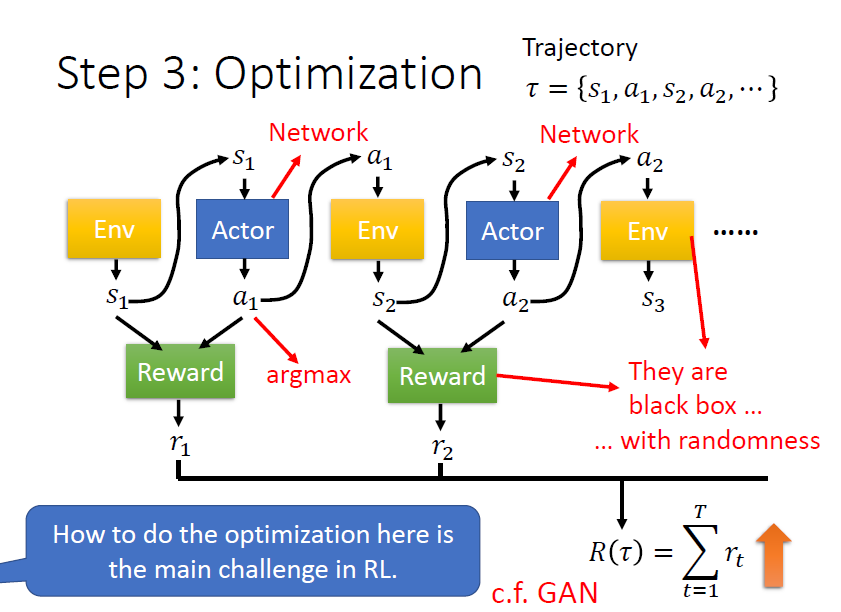
跟 所形成的 sequence 稱作 Trajectory,以 表示
定義 reward function 會考慮 action 和 observation 兩者,把所有的 相加得到 ,即是要去最大化的對象
目標:
找到 actor 的一組參數,使得 越大越好
問題:
- actor 具有隨機性:由於 action 是 sample 產生的,給定相同的 ,產生的 可能不一樣
- environment 和 reward 是黑盒子:environment 和 reward 都不是 network,也都具有隨機性
總之,還是可以把 RL 看成三個階段,只是在 optimization 時,如何最小化 loss(最大化 return)跟之前學到的方法是不太一樣的
與 GAN 的異同之處
| GAN | RL | |
|---|---|---|
| 相同 | 訓練 generator 時,會把 generator 跟 discriminator 接在一起,調整 generator 的參數讓 discriminator 的輸出越大越好 | RL 中,actor 如同 generator,environment 跟 reward 如同 discriminator,調整 actor 的參數,讓 environment 跟 reward 的輸出越大越好 |
| 相異 | GAN 的 discriminator 是一個 neural network | reward 跟 environment 不是 network,是一個黑盒子,無法用一般 gradient descent 調整參數,來得到最大的輸出 |
2. Optimization:Policy Gradient
更詳細介紹 Policy Gradient:https://youtu.be/W8XF3ME8G2I
2.1 如何控制 Actor
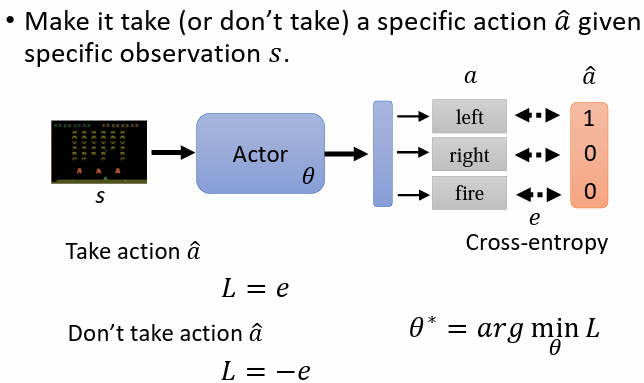
- 若希望 actor 在看到某個 時採取某一 action,只需將其看做一般的分類問題即可,為其設定 ground truth ,loss 採用 cross-entropy
- 若希望 actor 在看到某個 時不採取某一 action,只需將 cross-entropy 乘一個負號,最小化 等同於最大化 ,以使 actor 的 action 離 更遠
綜合以上兩種情況,可將 定義為 ,找到一組參數最小化 ,同時最大化 ,即可最小化 loss
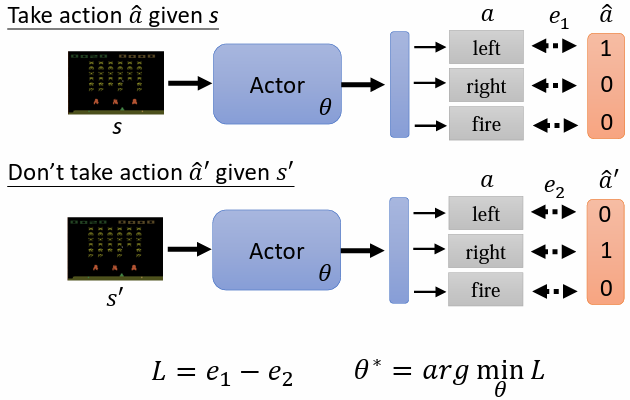
2.2 收集訓練資料
方法:
- 為每個行為標註為”好”或”不好”(+1、-1)
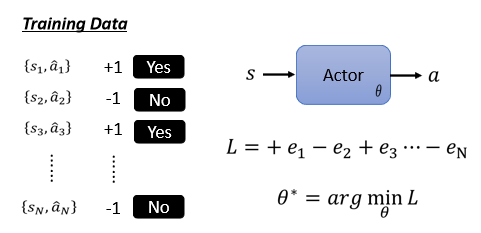
收集一堆某一 observation 下應該採取或不採取某一 action 的資料
定義 loss
- 每個行為給定一個分數
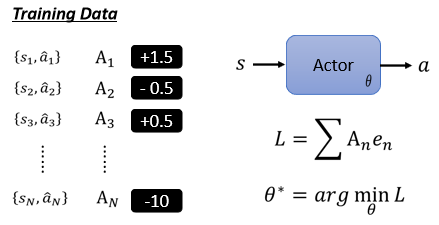
係數不再是只有正負 1
定義 loss
問題:
- 如何定義 (by Version 0 ~ Version 4)
- 如何產生 與 的 pair
2.3 如何定義 A
Version 0 (不正確)
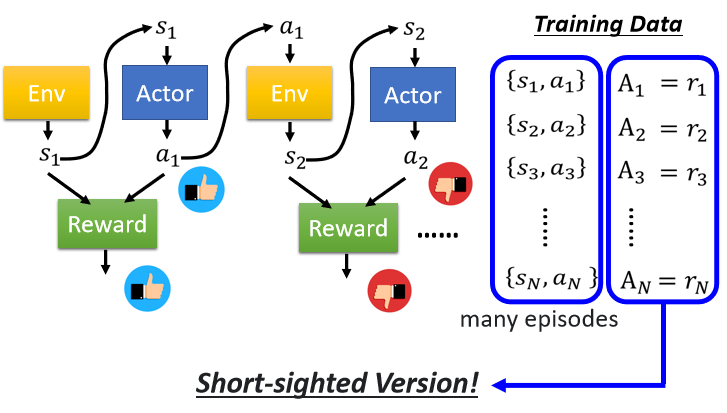
- 首先定義一個隨機的 actor,記錄若干個 episodes 中 actor 與環境互動時,面對每一個 observation 產生的 action a
- 對記錄下來的每個 action 計算 reward
- 將 reward 作為 用於定義 loss
問題:
短視近利,沒有長程規劃的概念
使用 Version 0,只要採取向左跟向右,得到的 reward 會是 0;只有開火時得到的 reward 是正的,導致機器會學到只有瘋狂開火才是對的,會一直傾向於射擊
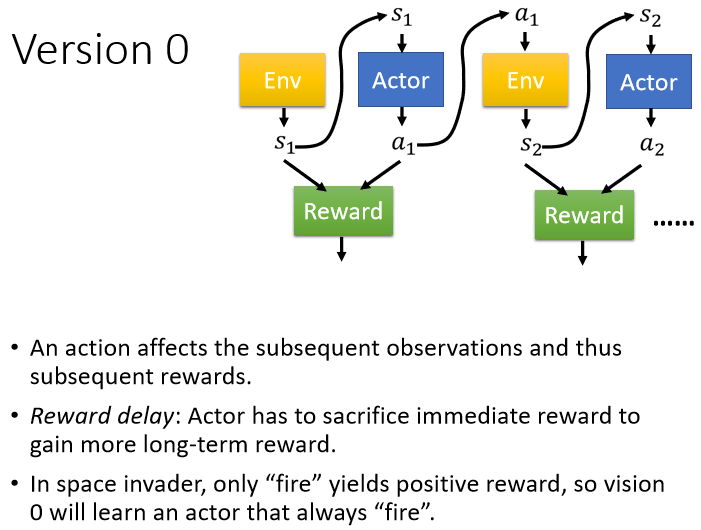
- 每一個行為並不是獨立的,每一個行為都會影響到接下來發生的事情
- Reward Delay:需要犧牲短期的利益,以換取更長程的目標
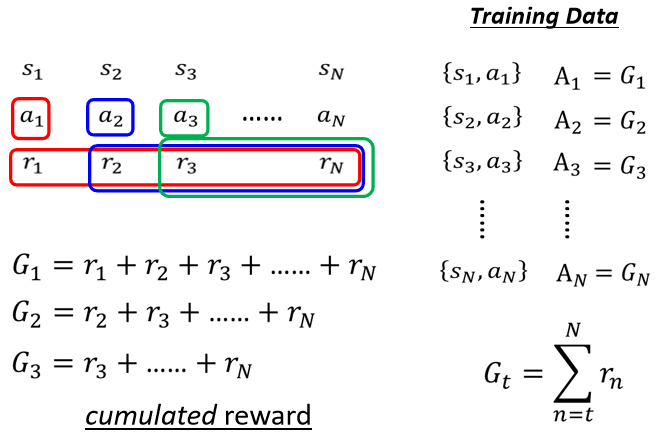
Version 1(Cumulated Reward)
Version 1 中, 有多好,不僅取決於 ,也取決於 之後所有的 reward,也就是把 當下及之後的所有 action 得到的 reward 通通加起來,得到 (cumulated reward)
問題:
假設遊戲非常長,把 歸功於 也不合適
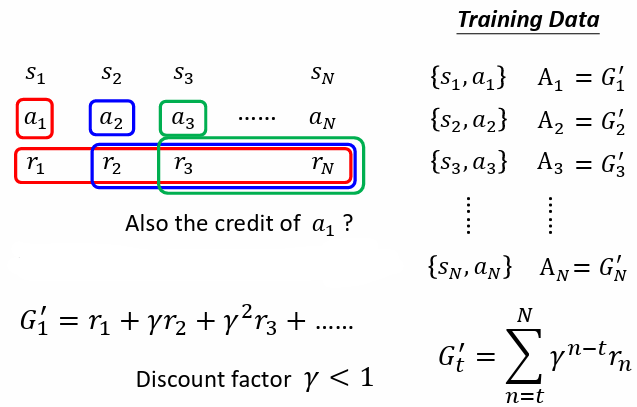
Version 2(Discounted Cumulated Reward)
改良 Version 1 的問題,新增 discount factor (),離 比較近的 reward 給予較大的權重,較遠的 reward 給予較小的權重,使較遠的 reward 影響較小
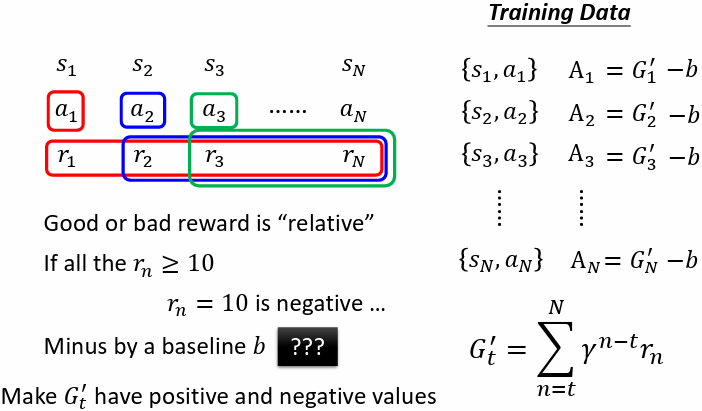
Version 3(標準化:-b)
假設某一遊戲得到的 reward 永遠都是正的,只是有大有小不同,因此每個 都會是正的,就算某些行為是不好的,還是會鼓勵機器採取某些行為,所以需要做標準化,改良 Version 2,把所有 減一個 baseline
Version 3.5(b = value funtion)
訓練一個 critic,給一個 observation ,輸出 ,讓 Version 3 的
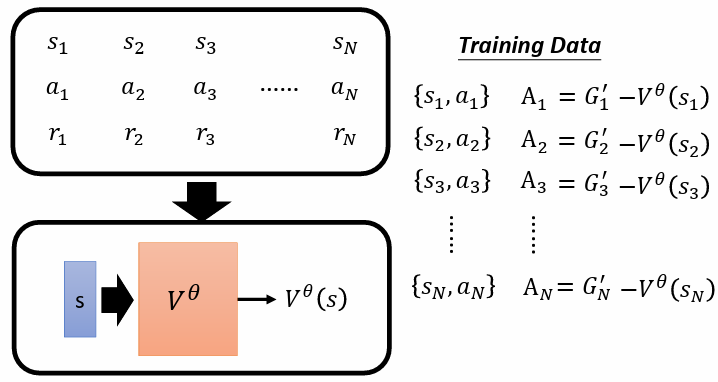
解釋:
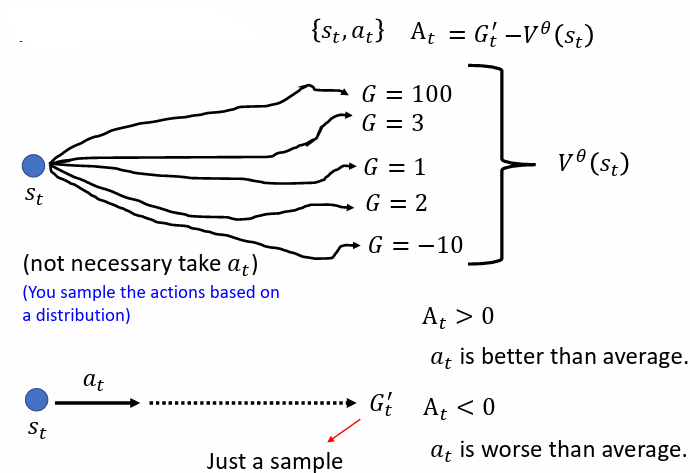
可以視為在 observation 下,actor 採取各種可能的 action 後得到的 期望值
則是真正結束一個 episode 後,得到的 discounted cumulated reward
是對 actor 在 observation 下,採取 action 的評價:
- 若 ,表示 ,意義為採取特定 action 得到的 比隨機選擇一個 action 的期望值 好,所以給予正的評價
- 若 ,表示 ,意義為採取特定 action 得到的 比隨機選擇一個 action 的期望值 不好,所以給予負的評價
問題:
表示用一次 sample 的結果減去所有的“平均”,似乎不夠準確
解決:
Version 4(Advantage Actor-Critic)
Version 4(Advantage Actor-Critic)
在 observation 下,採取 action 到 ,考慮在 下採取各種 action 的情况,並求所有 的平均值(期望值)
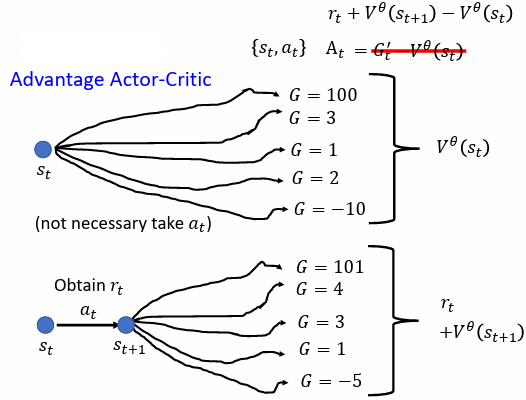
因為 value function 意義上可以代表各種 action 的平均 discounted cumulated reward,因此直接使用 表示 下各種 得到的 的平均值(期望值),所以將 替換為
⇒
2.4 訓練過程
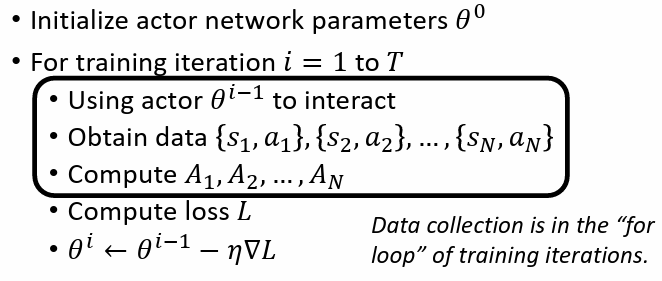
- 隨機初始化 actor,參數為
- 迭代更新 actor
用參數為 的 actor 蒐集資料,並以此資料計算 ,再計算 loss ,做 gradient descent 更新參數
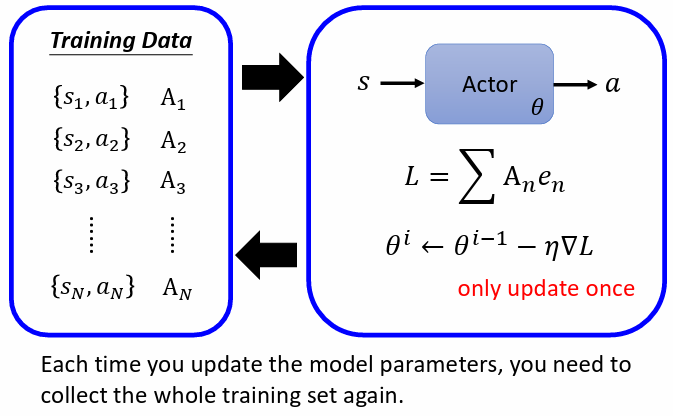
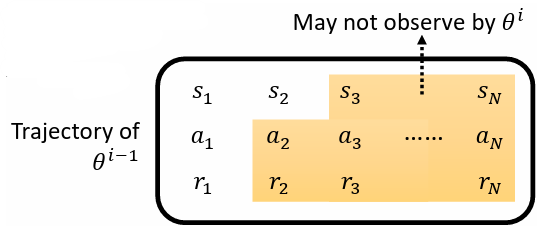
每次更新完一次參數以後,資料就要重新再收集一次,此舉非常花時間。而這麼做的目的是因為帶 參數的 actor 收集到的資料,不一定適合拿來做為更新 的資料
帶 參數的 actor 與帶 參數的 actor 採取的 action 不會一樣,因而參考過去的 trajectory 沒有意義
2.4.1 On-policy vs Off-policy
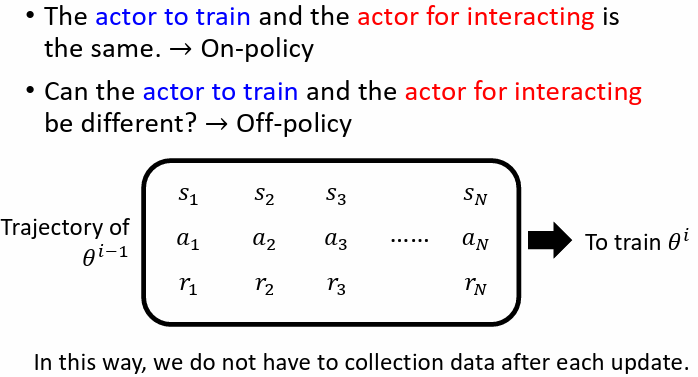
- On-policy Learning:訓練的 actor 跟與環境互動的 actor 是同一個
- Off-policy Learning:訓練的 actor 跟與環境互動的 actor 是不同的
好處是不用一直收集資料,可以用一次收集到的資料,更新多次 actor
Proximal Policy Optimization(PPO)即是採用 off-policy learning,細節可參考:https://youtu.be/OAKAZhFmYoI
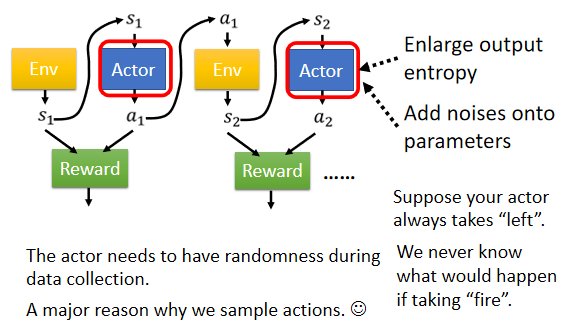
2.4.2 Exploration(增加 actor 做 action 的隨機性)
問題:
actor 所採取的 action 是 sample 而來的,因此 actor 採取的 action 具有隨機性
若一個 actor 採取行為的隨機性不夠,則一個 episode 結束後,所蒐集到的資料中有些 actions 根本沒有被 sample 到,會導致無從知道這些 actions 的好壞
解決:
期望跟環境互動的 actor 採取 actions 的隨機性要夠大,如此才能收集到比較豐富的資料
因此在訓練時,可藉由以下方式解決:
- 刻意加大 actor 輸出的 distribution 的 entropy(比較容易 sample 到機率較低的 action)
- 在 actor 參數上加 noise
- …
Exploration 是 RL 訓練過程中重要的技巧
3. Critic
3.1 Value Function
有一 actor 參數為 ,當前的 observation 為 ,value function 為基於參數為 的 actor 及 observation ,所預期的 discounted cumulated reward(期望值的概念)
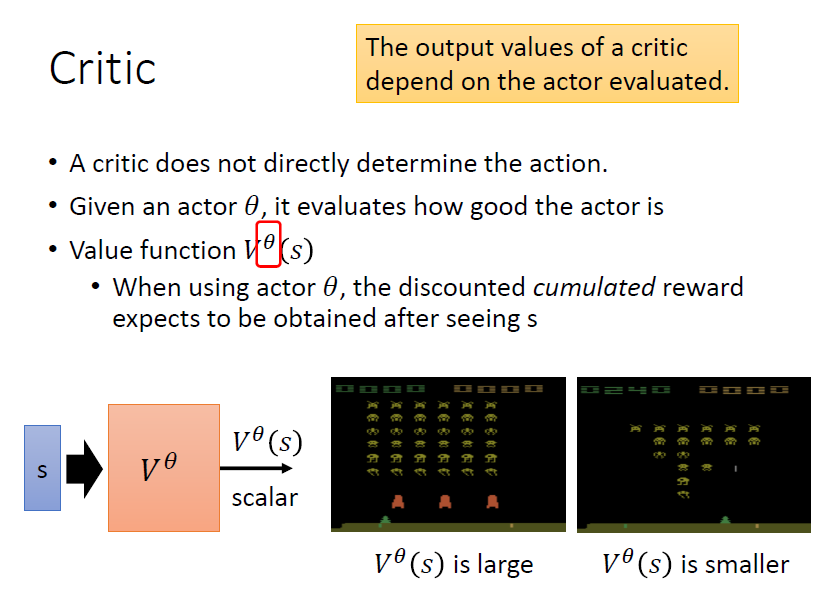
critic 做的事就是在只看到當前 而尚未完成這局遊戲前,就得到對參數為 的 actor 的評價
3.2 How to train critic
兩種方法訓練 critic:Monte Carlo 及 Temporal-Difference
3.2.1 Monte Carlo(MC) Based Approach
將 actor 拿去跟環境互動很多輪(episodes),得到一些遊戲的記錄(訓練資料)
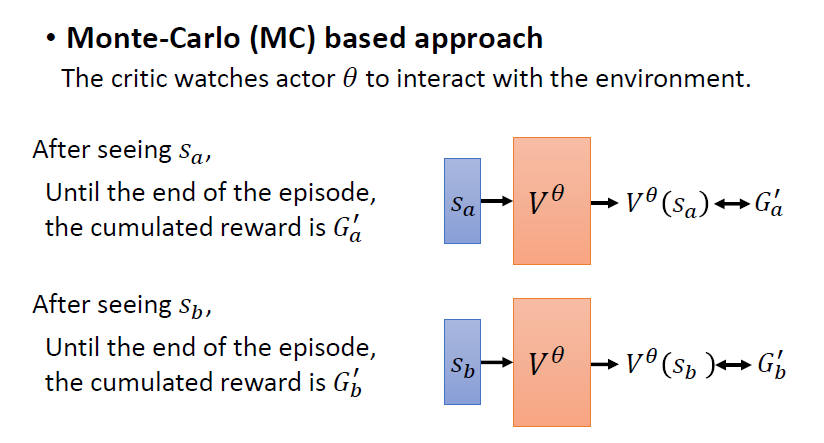
針對某一筆訓練資料,其 observation 為 , 要與 discounted cumulated reward 越接近越好。利用這些訓練資料,訓練 critic 以輸出期待的
3.2.2 Temporal-Difference(TD) Approach
不需玩完整場遊戲(一個 episode)得到訓練資料。只要在看到 observation , actor 執行 action ,得到 reward ,接下來再看到 observation ,就能夠更新一次 critic 參數。此方法對於很長的遊戲或玩不完的遊戲非常合適
觀察:
和 之間有著代數關係:
移項後可得:
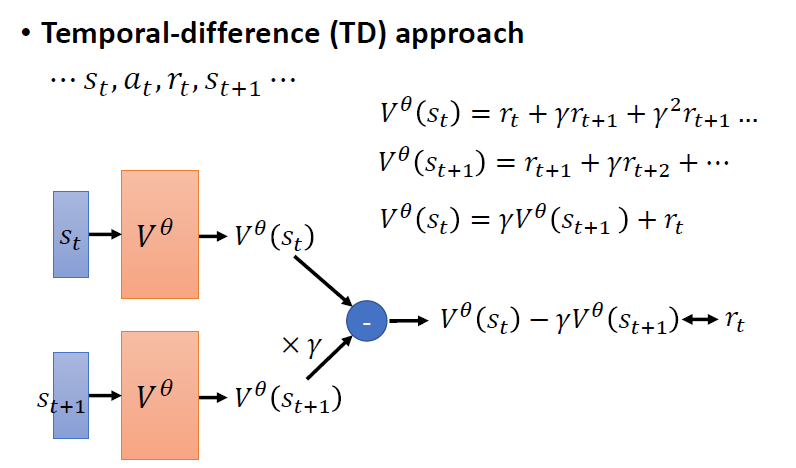
擁有 訓練資料,即可計算 ,目標希望與 越接近越好
3.2.3 MC vs TD
由於 MC 與 TD 的背後的假設不同,訓練得到的 critic 也不同
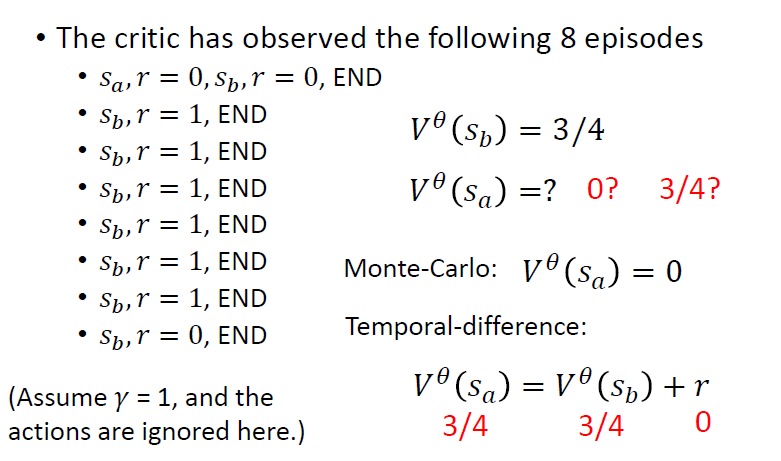
MC 與 TD 得到的 都為 3/4,但 MC 得到的 為 0,而 TD 得到的 為 3/4
使用 critic 於訓練 actor 上:Version 3.5、Version 4
4. Tip of Actor-Critic
actor 與 critic 都是一個 network,兩者皆以 observation 作為輸入,actor 輸出每一個 action 的機率分布;critic 輸出一個數值
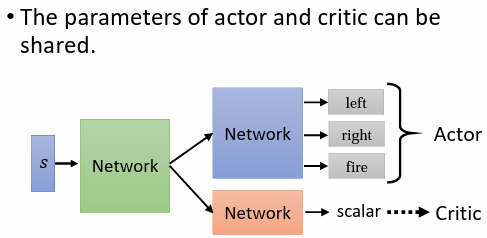
可將 actor 及 critic 兩個 network,共用部分的 network
5. To Learn More:DQN
直接使用 critic 決定要採取什麼 action,最知名的做法就是 Deep Q Network(DQN),細節可參考:https://youtu.be/o_g9JUMw1Oc、https://youtu.be/2zGCx4iv_k
DQN 的變形:Rainbow: Combining Improvements in Deep Reinforcement Learning(Rainbow)
6. Reward Shaping
6.1 Sparse Reward
問題:
Sparse Reward 就是 reward 大多數情況都是 0,只有在少數情況是一個非常大的數值。意味著很多 actions 無從判斷是好是壞。例如圍棋到遊戲結束才會有 reward,過程中都沒有 reward
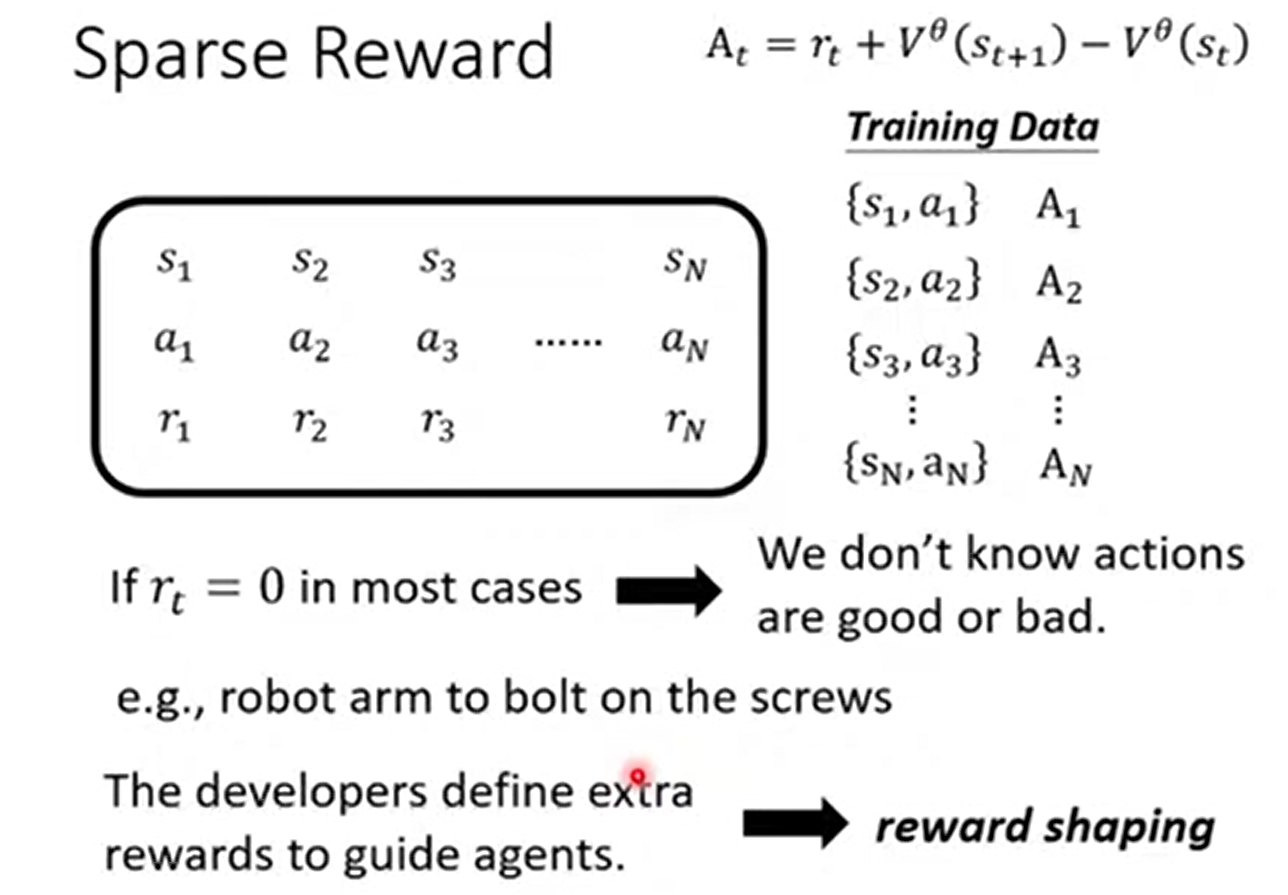
解決:
Reward Shaping:定義一些額外的 reward 來幫助 actor 學習
舉例:
如射擊類遊戲,除贏得勝利得到 +reward 及輸掉遊戲得到 - reward 外,額外定義了其他行為可以得到正的或負的 reward,如撿到補血包(+)、待在原地(+)、存活(-)等等
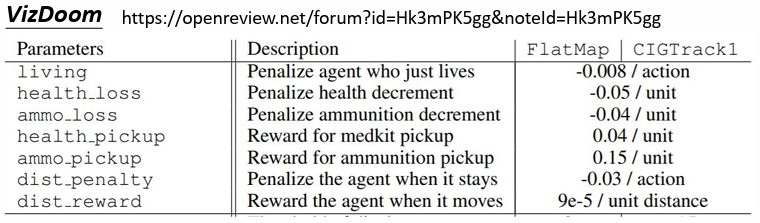
因此 reward shaping 都要倚靠人類的 domain knowledge 來定義
6.2 Curiosity
reward shaping 的其中一種做法:Curiosity based reward shaping
基於好奇心,讓 actor 看到有意義的新東西時獲得 reward
7. No Reward:Imitation Learning
問題:
- 遊戲中雖然容易定義 reward,但在其他任務要定義 reward 很困難
- 人工設置一些 reward(reward shaping)教機器學時,若 reward 沒設定好,機器可能會產生奇怪、無法預期的行為
解決:
沒有 reward 的狀況下,可使用 imitation learning
7.1 Imitation Learning
在沒有 reward 的情況下訓練 actor
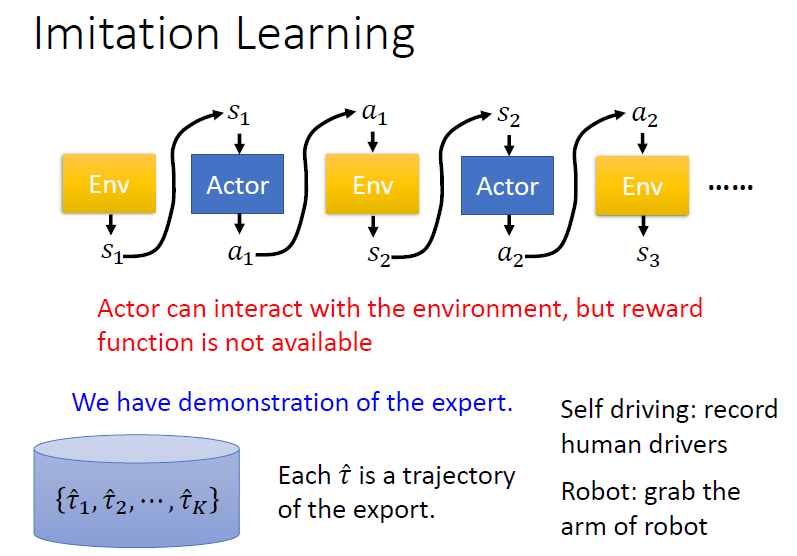
引入 expert(通常為人類)的示範。找很多 experts 跟環境互動,記錄互動的結果 ,每個 代表一個 trajectory
舉例:
- 自動駕駛:記錄人類的駕駛行為
- 機械手臂:拉著機器的手臂示範
7.1.1 Behavior Cloning
類似於監督式學習,讓機器做出的 action 跟 export 做出的 action 越接近越好,又稱作 Behavior Cloning
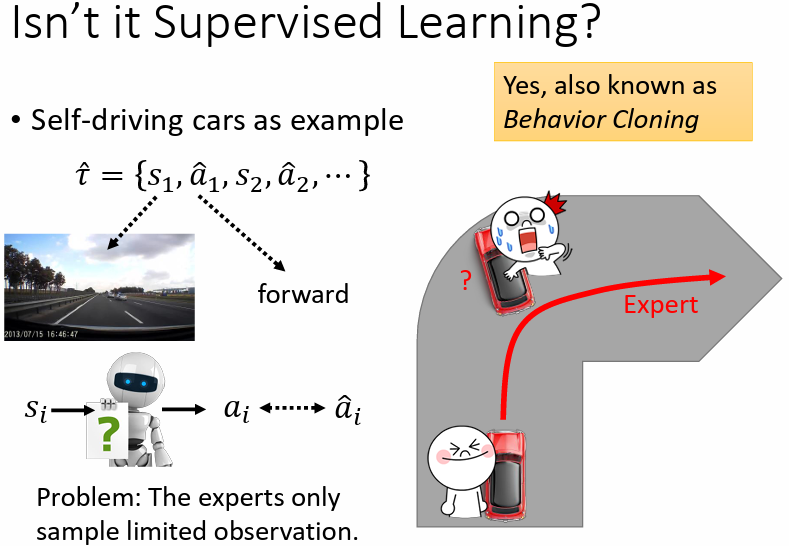
問題:
- experts 的記錄有限,若 actor 遇到從沒見過的情境,可能會做出無法預期的 action
- experts 做出的一些 actions actor 並不一定需要學習模仿,模仿的行為可能不會帶來好的結果
7.1.2 Inverse Reinforcement Learning
從 expert 的 demonstration,還有 environment 去反推 reward funtion,學出一個 reward funtion 後,再用一般的 RL 來訓練 actor
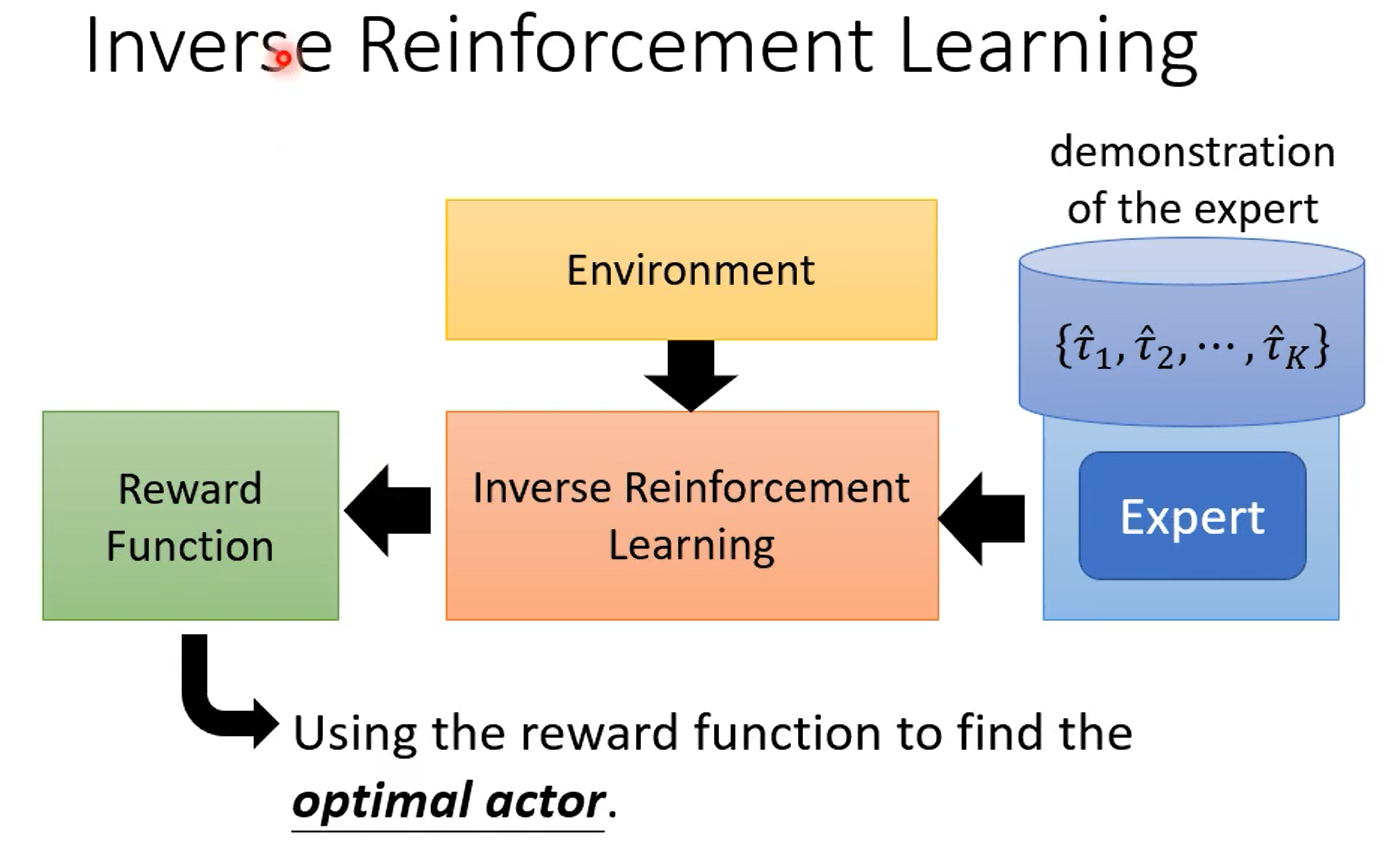
如何找出 reward funtion?
原則:teacher 的行為總是最好的
步驟:
- 初始化一個 actor
- 迭代訓練
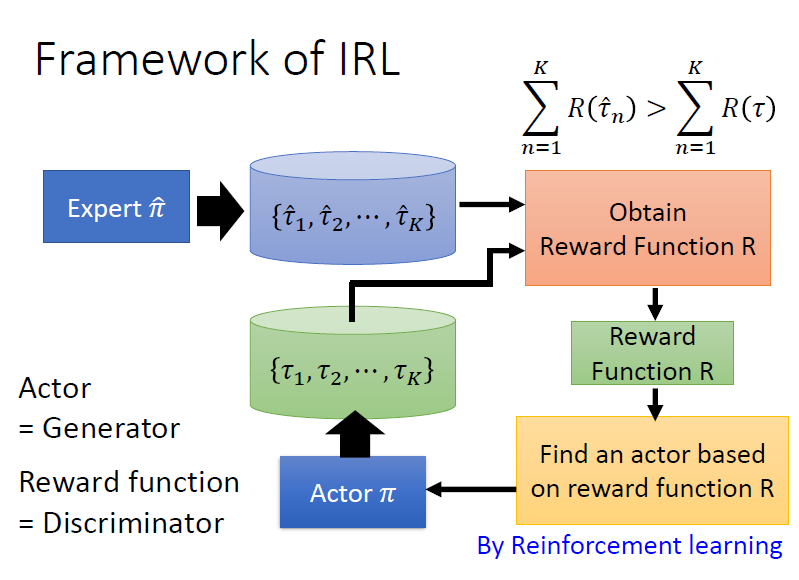
- actor 與環境互動獲得多個 trajectory
- 定義(更新)一個 reward function,能夠使老師的 reward 總和 比 actor 的 reward 總和 更高
- 利用定義的 reward function 進行訓練,更新 actor 的參數,使 actor 能夠最大化 reward
- 輸出 reward function 以及訓練得到的 actor
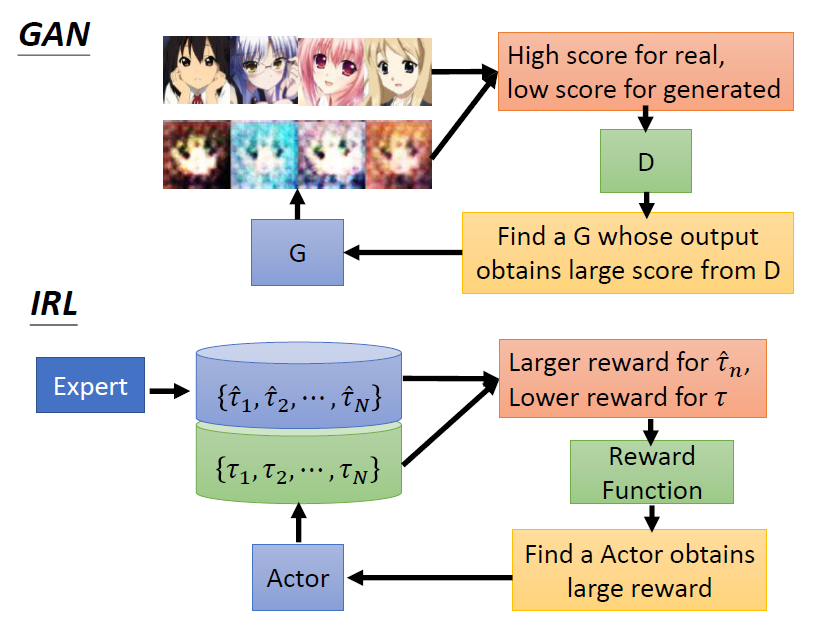
GAN vs IRL
IRL 就如同 GAN,actor 可視為 generator;reward function 可視為 discriminator